

Önüm aýratynlyklary
-
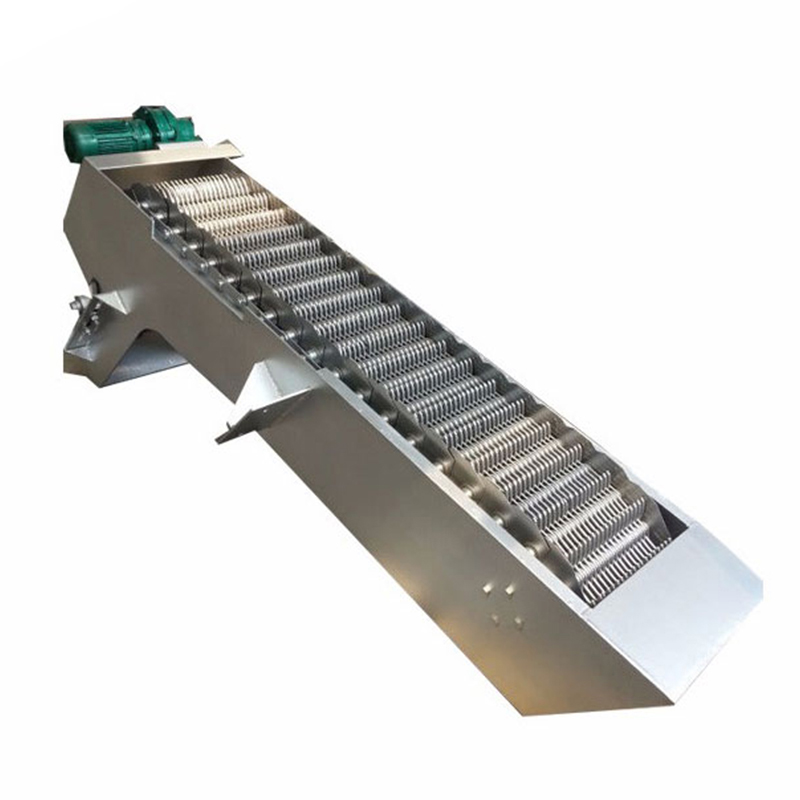
1. Perokary öndürijilikli disk: Smoothumşak işlemek, pes ses, uly ýük göterijiligi we ýokary geçiriş netijeliligi üçin sikloidal ýa-da dikligine reduktor bilen enjamlaşdyrylan.
-
2. Ykjam we modully dizaýn: Gurmak we göçürmek aňsat; iş wagtynda öz-özüni arassalamak we pes tehniki talaplar.
-
3. Çeýe dolandyryş opsiýalary: Taslamanyň zerurlyklaryna baglylykda ýerli ýa-da uzakdan işledilip bilner.
-
4. Gurlan gorag: Toplumlaýyn artykmaç ýükden goramak, içerki bölekleri gorap, näsazlyk ýüze çykan halatynda enjamy awtomatiki usulda saklaýar.
-
5. Giňeldilip bilinýän dizaýn: 1500 mm-den ýokary giňlikler üçin gurluş bitewiligini we barlag netijeliligini üpjün etmek üçin parallel birlikler oturdylýar.
Adaty programmalar
Bu awtomatiki mehaniki ekran giňden ulanylýarşäher we senagat hapa suwlaryny arassalamakgalyndylary üznüksiz aýyrmak üçin ulgamlar. Bu ideal:
-
Municipal Şäher häkimliginiň lagym arassalaýjy desgalary
-
EsAşaýyş kanalizasiýasy
-
Pompan stansiýalary we suw desgalary
-
PlantGüýçli zawodlaryň kabul ediliş barlagy
-
TextTekstil, çap we boýag pudaklary
-
Ood Iýmit we içgi gaýtadan işlemek
-
Qu Ekerançylyk we balykçylyk
-
Aper Kagyz fabrikleri we çakyr önümleri
-
Ugh Gyrgynçylyk jaýlary we zawodlar
Bu bölüm aşaky enjamlary goramakda, tehniki hyzmatyň çykdajylaryny azaltmakda we ulgamyň umumy işleýşini gowulandyrmakda möhüm rol oýnaýar.










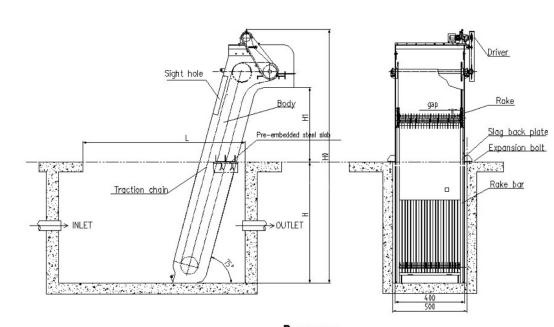
Tehniki parametrler
| Model / parametr | HLCF-500 | HLCF-600 | HLCF-700 | HLCF-800 | HLCF-900 | HLCF-1000 | HLCF-1100 | HLCF-1200 | HLCF-1300 | HLCF-1400 | HLCF-1500 | ||
| Enjamyň ini B (mm) | 500 | 600 | 700 | 800 | 900 | 1000 | 1100 | 1200 | 1300 | 1400 | 1500 | ||
| Kanalyň ini B1 (mm) | B + 100 | ||||||||||||
| Netijeli panjara aralygy B2 (mm) | B-157 | ||||||||||||
| Gämi boltlar aralygy B3 (mm) | B + 200 | ||||||||||||
| Jemi ini B4 (mm) | B + 350 | ||||||||||||
| Diş aralygy b (mm) | t = 100 | 1≤b≤10 | |||||||||||
| t = 150 | 10 | ||||||||||||
| Burç gurmak α (°) | 60-85 | ||||||||||||
| Kanalyň çuňlugy H (mm) | 800-12000 | ||||||||||||
| Zyňyndy porty bilen H1 platformasynyň arasyndaky beýiklik (mm) | 600-1200 | ||||||||||||
| Jemi beýiklik H2 (mm) | H + H1 + 1500 | ||||||||||||
| Yzky rack beýikligi H3 (mm) | t = 100 | 0001000 | |||||||||||
| t = 150 | 001100 | ||||||||||||
| Ekranyň tizligi v (m / min) | ≈2.1 | ||||||||||||
| Motor güýji N (kw) | 0.55-1.1 | 0.75-1.5 | 1.1-2.2 | 1.5-3.0 | |||||||||
| Kellesi ýitirmek (mm) | ≤20 (dyknyşyk ýok) | ||||||||||||
| Raýat ýük | P1 (KN) | 20 | 25 | ||||||||||
| P2 (KN) | 8 | 10 | |||||||||||
| △ P (KN) | 1.5 | 2 | |||||||||||
Bellik H Pis H = 5.0m bilen hasaplanýar, her 1m H köpeldi, soň P jemi = P1 (P2) + △ P
t: diş dişiniň gödekligi: t = 150mm
gowy: t = 100mm
| Model / parametr | HLCF-500 | HLCF-600 | HLCF-700 | HLCF-800 | HLCF-900 | HLCF-1000 | HLCF-1100 | HLCF-1200 | HLCF-1300 | HLCF-1400 | HLCF-1500 | ||
| Akymyň çuňlugy H3 (m) | 1.0 | ||||||||||||
| Akym tizligi V³ (m / s) | 0.8 | ||||||||||||
| Grid aralygy b (mm) | 1 | Akym derejesi Q (m³ / s) | 0.03 | 0.04 | 0.05 | 0.06 | 0.07 | 0.08 | 0.08 | 0.09 | 0.10 | 0.11 | 0.12 |
| 3 | 0.07 | 0.09 | 0.10 | 0.12 | 0.14 | 0.16 | 0.18 | 0.20 | 0.22 | 0.24 | 0.26 | ||
| 5 | 0.09 | 0.11 | 0.14 | 0.16 | 0.18 | 0.21 | 0.23 | 0.26 | 0.28 | 0.31 | 0.33 | ||
| 10 | 0.11 | 0.14 | 0.17 | 0.21 | 0.24 | 0.27 | 0.30 | 0.33 | 0.37 | 0.40 | 0.43 | ||
| 15 | 0.13 | 0.16 | 0.20 | 0.24 | 0.27 | 0.31 | 0.34 | 0.38 | 0.42 | 0.45 | 0.49 | ||
| 20 | 0.14 | 0.17 | 0.21 | 0.25 | 0.29 | 0.33 | 0.37 | 0.41 | 0.45 | 0.49 | 0.53 | ||
| 25 | 0.14 | 0.18 | 0.22 | 0.27 | 0.31 | 0.35 | 0.39 | 0.43 | 0.47 | 0.51 | 0.55 | ||
| 30 | 0.15 | 0.19 | 0.23 | 0.27 | 0.32 | 0.36 | 0.40 | 0.45 | 0.49 | 0.53 | 0.57 | ||
| 40 | 0.15 | 0.20 | 0.24 | 0.29 | 0.33 | 0.38 | 0.42 | 0.46 | 0.51 | 0.55 | 0.60 | ||
| 50 | 0.16 | 0.2 | 0.25 | 0.29 | 0.34 | 0.39 | 0.43 | 0.48 | 0.52 | 0.57 | 0.61 | ||